All Publications
International Papers
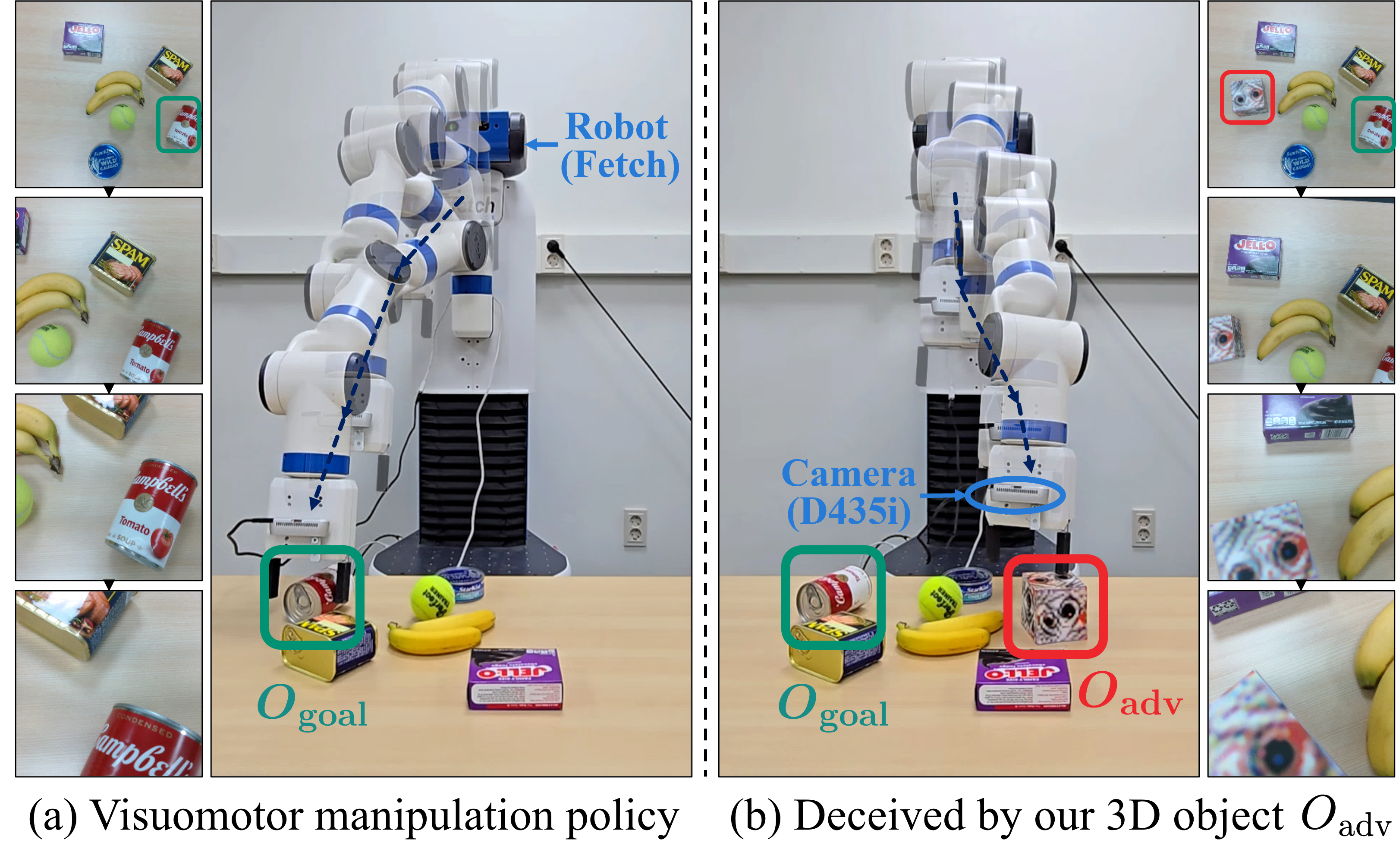
Beyond the Patch: Exploring Vulnerabilities of Visuomotor Policies via Viewpoint-Consistent 3D Adversarial Object
IEEE International Conference on Robotics and Automation (ICRA), 2026
3D Adversarial Attack
Visuomotor Policies
Differential Rendering
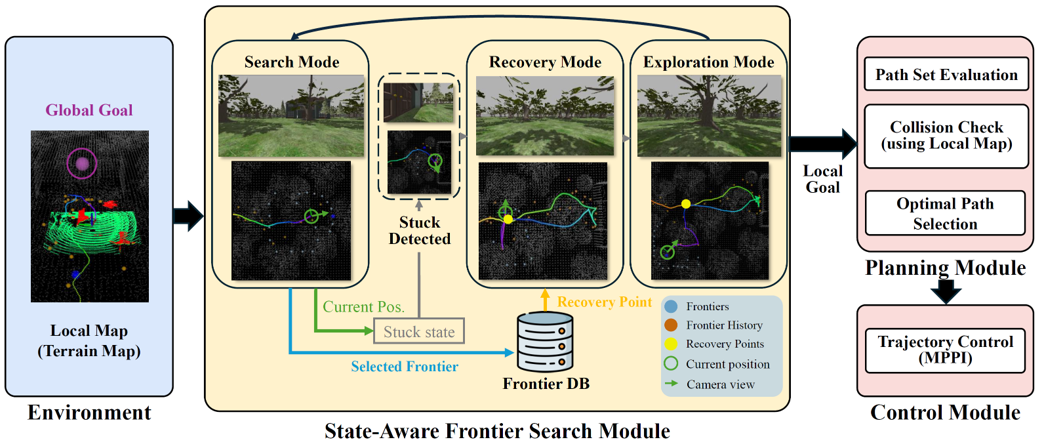
Mode-Switching Frontier Search for Robust Autonomous Exploration in Complex Terrain
International Conference on Robot Intelligence Technology and Applications (RiTA), 2025
Frontier Search
Path Planning
Autonomous Exploration
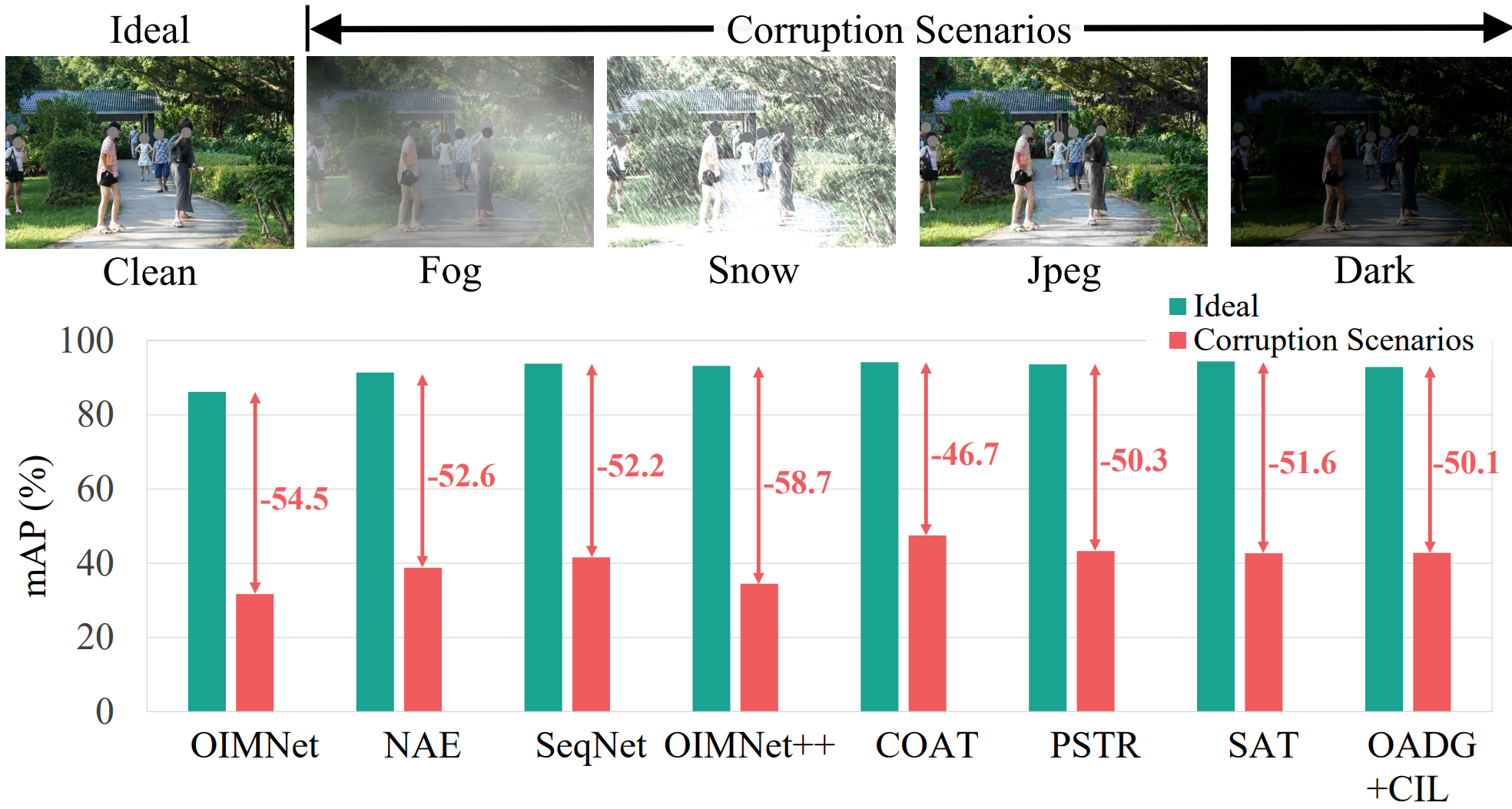
Towards Robustness of Person Search against Corruptions
IEEE/CVF International Conference on Computer Vision (ICCV), 2025
Corruption
Person Search
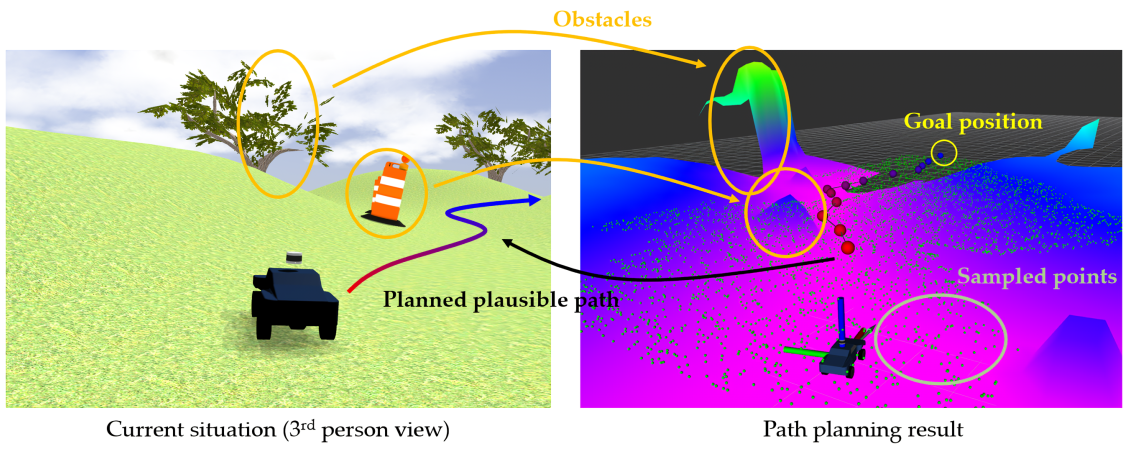
Analysis of Terrain-Aware Optimal Path Planning Methods for Stable Off-Road Navigation
Off-Road Autonomy Workshop at IEEE Intelligent Vehicles Symposium (IV), 2024
Path Planning
Domestic (Korean) Papers
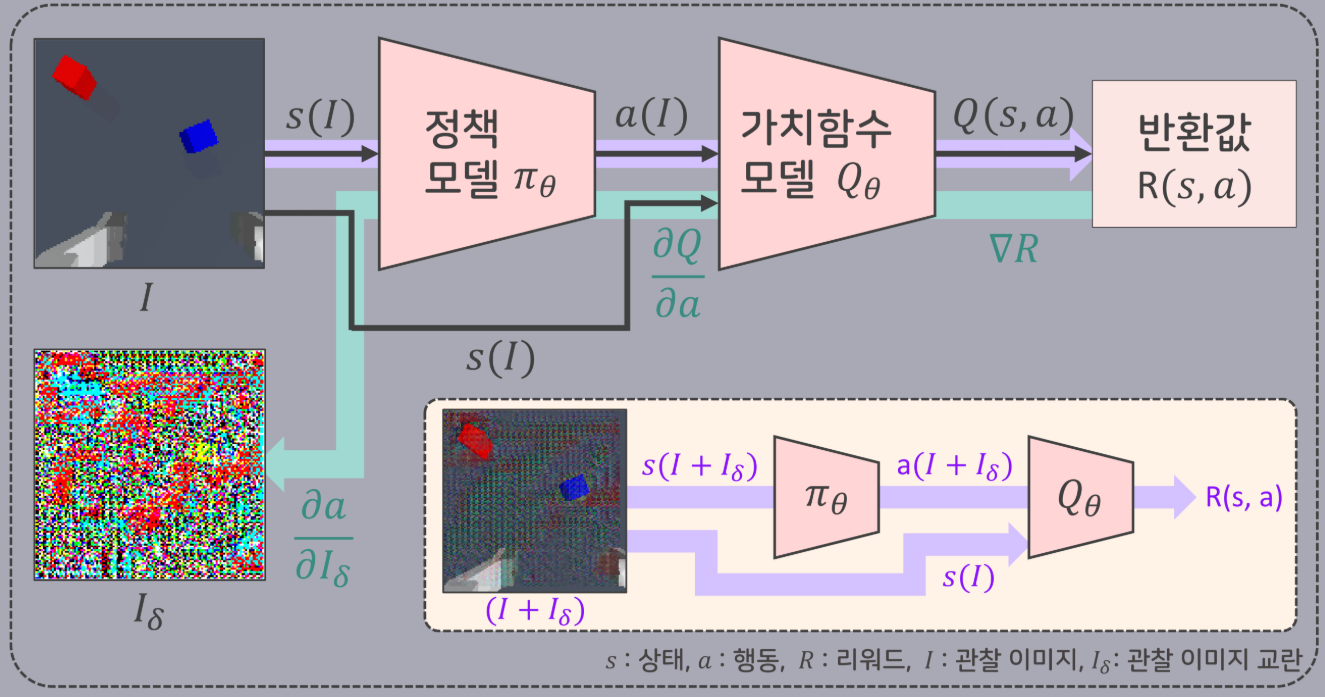
Adversarial Attack on Visuomotor Policy
Korea Computer Congress (KCC), 2024
Adversarial Attack
Visuomotor Policy
Safety